
Update: 2020/1/22
If you find this article at all helpful, please consider a supportive contribution.

This is somewhat specific to the Turtlebot 2 that is being shipped with the Astra Pro by Clearpath Robotics.
At least in my case, there were some obstacles in getting the RGB camera and depth camera working simultaneously out of the box. This post is an attempt to document a working solution.
Appears that others have had similar issues fwiw.
Getting the Launch file
I will quickly outline the solution to get the Astra Pro working such that depth
and RGB image topics are recognized by RViz. (I specify the objective as getting
RViz to recognize /camera/rgb/image_raw topic as this is a result that was
necessary for the current ongoing project.
First get the astra_pro.launch file following the below steps:
mkdir -p turtlebot_ws/src
cd turtlebot_ws/src
catkin_init_ws
git clone https://github.com/tonybaltovski/ros_astra_launch.git --branch
upstream
git clone https://github.com/tonybaltovski/ros_astra_camera.git --branch
upstream
cd ..
rosdep install --from-paths src --ignore-src --rosdistro=indigo -y
catkin_make
source devel/setup.bash
rosrun astra_camera create_udev_rules
(you may need to reboot here)
roslaunch astra_launch astra_pro.launch
You can investigate the launch file to get a better idea of what is being called, and what parameters are being set.
This will allow for the depth camera to function as well as the RGB camera.
After launching roslaunch astra_pro.launch, we can run rostopic list and the list of
all available topics will be outputted to the terminal.
We should be able to confirm that the below topics related to the depth camera and RGB image camera are available as well.
/camera/depth/camera_info
/camera/depth/image
/camera/depth/image/compressed
/camera/depth/image/compressed/parameter_descriptions
/camera/depth/image/compressed/parameter_updates
/camera/depth/image_raw
…
/camera/rgb/astra_pro_uvc/parameter_descriptions
/camera/rgb/astra_pro_uvc/parameter_updates
/camera/rgb/camera_info
/camera/rgb/image_raw
/camera/rgb/image_raw/compressed
/camera/rgb/image_raw/compressed/parameter_descriptions
/camera/rgb/image_raw/compressed/parameter_updates
At this point rosrun image_view image_view image:=/camera/rgb/image_raw works
but trying to subscribe to the /camera/rgb/image_raw topic in RViz will result in the
following status error message:
CameraInfo/P resulted in an invalid position calculation (nans or infs)
This requires a relatively manual step that is most likely not obvious to new comers. To resolve this we need to:
- Create a yaml file related to the RGB camera calibrations, which will be named
rgb_Astra_Orbbec.yaml. - Edit the
astra_pro.launchto reflect the location of the yaml file.
Camera calibration
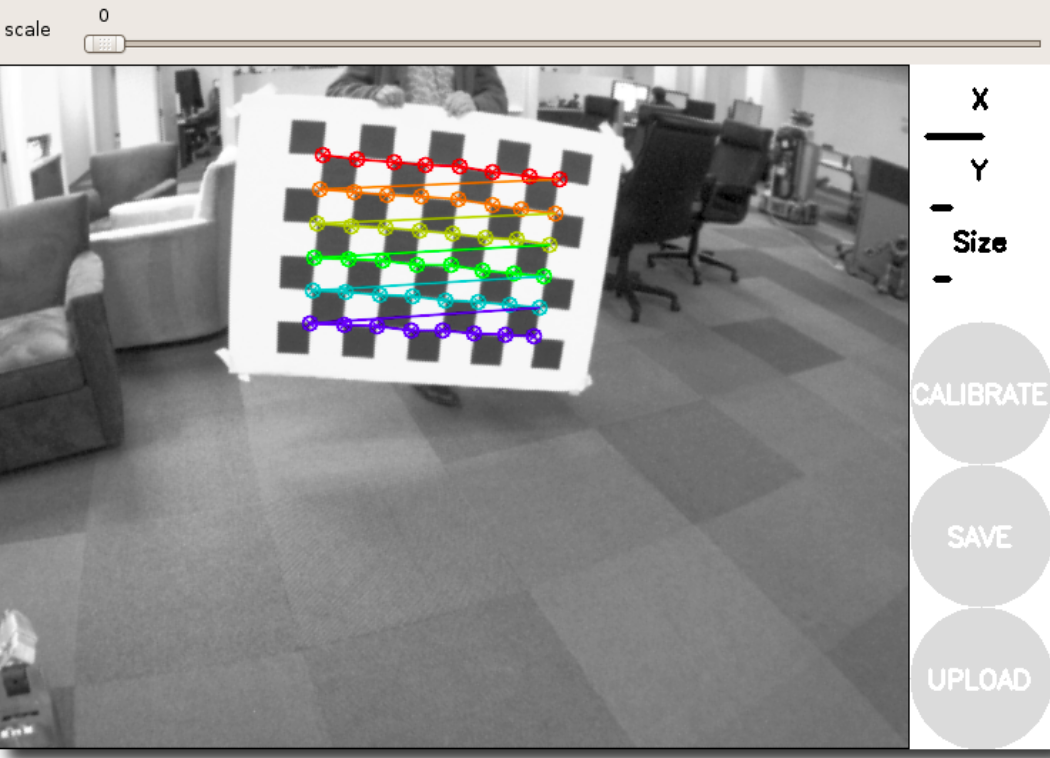
In order to generate the rgb_Astra_Orbbec.yaml file we can follow the tutorial
“How to Calibrate a Monocular Camera”.[1] A couple points to note:
-
They use a large checker board for calibration, with the checker dimensions set at 108mm. You can use a smaller checker board but make sure that you set the
--squareargument to reflect the size that you use. A checker board printed to A4 printing paper will be associated with 2.5cm sized checkers, based on my measurements. Note that a checker board template is made available in the tutorial. -
After calibrating hit commit, (it does really take a minute or so, and the screen does appear to freeze temporarily), and this should create a directory in
.roscalledcamera_infoif it doesn’t exist already and place a file namedrgb_Astra_Orbbec.yaml.
Edits to Launch file
Before making the amends, launch astra_pro.launch and run rostopic echo
/camera/rgb/camera_info. You should notice that the values are not populated
and filled with zeros.
---
header:
seq: 416
stamp:
secs: 1493810620
nsecs: 89788527
frame_id: camera_rgb_optical_frame
height: 0
width: 0
distortion_model: ''
D: []
K: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
R: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
P: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
Open the launch file and direct your attention to 19-23:
<!-- By default, calibrations are stored to
file://${ROS_HOME}/camera_info/${NAME}.yaml,
where ${NAME} is of the form "[rgb|depth]_[serial#]", e.g.
"depth_B00367707227042B".
See camera_info_manager docs for calibration URL details. -->
<arg name="rgb_camera_info_url" default="" />
<arg name="depth_camera_info_url" default="" />
Set the default argument for rgb_camera_info_url
file:///$HOME/.ros/camera_info/rgb_Astra_Orbbec.yaml
Now go to line 132, where you should see
<!-- <param name="camera_info_url" value="file:///tmp/cam.yaml"/> -->
Uncomment and replace with:
<param name="camera_info_url" value="$(arg rgb_camera_info_url)"/>
This should resolve the issue and rostopic echo /camera/rgb/camera_info
should output the correct values derived from the calibration yaml file we
generated earlier.
---
header:
seq: 44
stamp:
secs: 1493810762
nsecs: 374881266
frame_id: camera_rgb_optical_frame
height: 480
width: 640
distortion_model: plumb_bob
D: [0.1924862242666659, -0.1428745350678355, -0.008005953314755045,
-0.01514558091529794, 0.0]
K: [631.9627446307516, 0.0, 292.3340769022051, 0.0, 626.7628503190605,
231.5643918983762, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [663.3839721679688, 0.0, 285.5615141729359, 0.0, 0.0, 662.3782348632812,
228.5056059693034, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
Further, subscribing to /camera/rgb/image_raw should not output a status
error in RViz, and you should be able to visualize the RGB image properly.
Reference
- http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration